BigData Algo
一些通用的大数据、分布式等方面的算法总结。单独出一篇文章,因为这类算法都是通用的,但具体到各个系统,实现方式可能不同,本篇只总结算法思想,可能伪代码实现最基础的算法,必要时会给出现实系统的参考链接。
一致性哈希
哈希可以说是出现在大数据的方方面面了。一到切分,基本都是它。一致性哈希,先说哈希,也就是虚拟哈希空间,有2^32个片,叫哈希环。
然后哪个服务器负责处理哪些哈希片,是靠映射。具体方法没有规定,比如,可以用服务器ip来hash,还是2^32取模,得到的数字,它就处理哈希环上对应的片。数据来了先hash取模,得到的值然后顺时针找可以服务的服务器,就发给它。
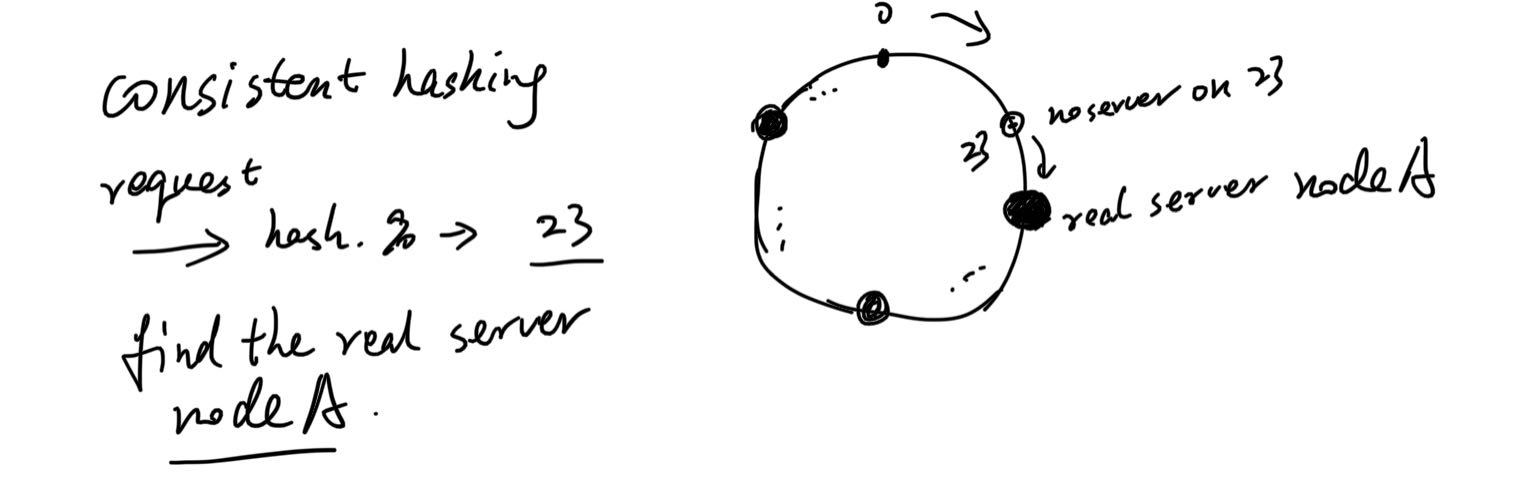
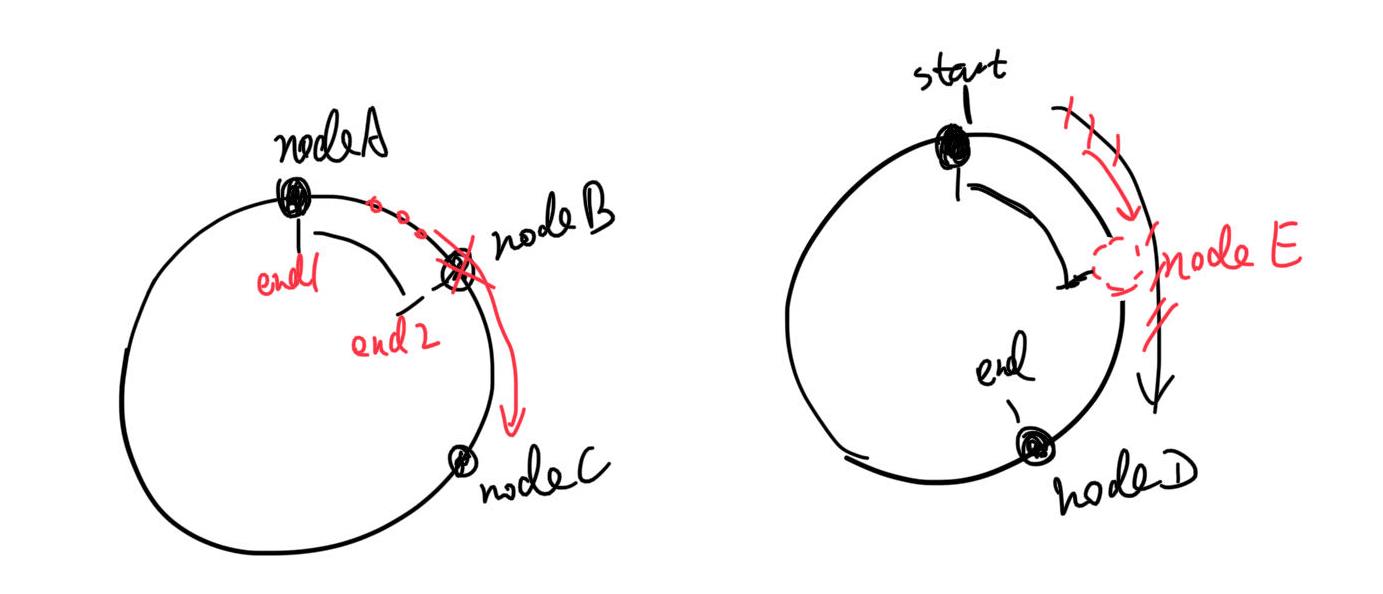
如果中间某个服务器down了,反正算法是往后找到第一个服务器,它还是会被处理。当然这个就要求“数据可以被任何server处理”,不能是特别的。比如,相关数据只在某个节点,其他节点获取不到,处理条件都不满足。当然这是理想条件,现实很多也不满足,但它们涉及到的数据也可以是多节点都存有备份,但又不至于所有节点都需要。这个也等于缩容,受影响的数据是“会落到这一下线节点的数据”,我们称为nodeB,将前一个节点nodeA的末尾片记为end1,当前节点末尾片为end2,也就是(end1, end2]区间的数据原本应该找这个节点B,但它下线了,就会变成去找下一个节点nodeC。其他片上的数据不会受到影响。虚拟哈希环不会改变大小,永远的2^32片。如下图左边所示。
而扩容就在hash环上加一个node,原本[start, end]会找nodeD,你在nodeD前面塞了个nodeE,那么[start, nodeE_end]这部分数据就是受影响的数据,原来要找nodeD,现在变成nodeE。如下图右边所示。
优点不难猜测,节点上下线只会影响局部数据,这已经是很大的优点了。不能傻到还在N个节点,就hash(req)%N吧,增加节点你还需要把N改成N+1。而且它会改变很多请求的路由,缓存都不无法利用。(当然,要是系统就是这样的简单,啥也不要求,那也不用考虑改变了,简单就是最好的。)
但这还有优化空间,因为在前面所说的算法中,nodeX总是要分到连续的多片,现实中是很难保证每片都差不多热度,也就更不能要求每个node的请求都是均匀的。而且节点数量改变时,在现实条件下,上下节点是要改变很多东西的,可能你要将一些数据复制到节点中才能正常服务,也叫做Node rebuilding。它是一个很重的操作。
为了解决,又引入“虚拟节点机制”,就是hash环上不是物理server node,而是每个物理server都膨胀出,node0-0、node0-1等等的虚拟节点,这样虚拟节点打散分布在hash环上,倾斜可能性就小些。不再是一个node去处理连续的一大片区域。如下图所示。
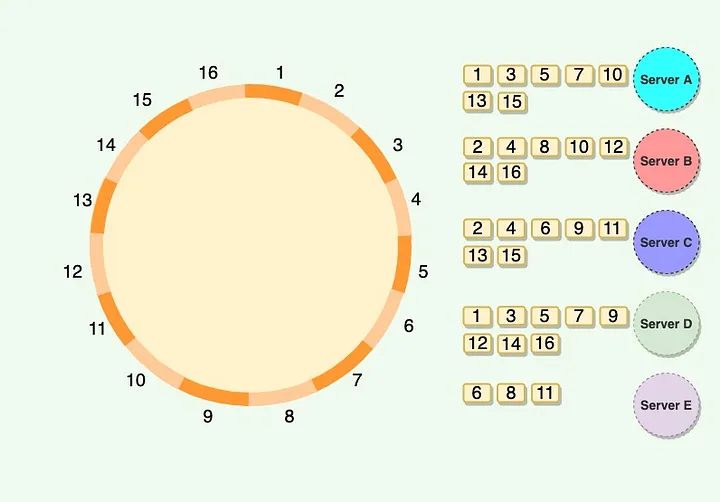
向图中展示的一样,一个server node处理离散的几个片,那么每个server的负载均衡就很好操作了,比如,我可以让1个server服务3个高热度的,其他server负载10个低热度的。不用费心去在环上取一个很好的位置,才能把连续的几片服务好,有变化时更是运维难度大。而迁移片也是只对这么一个小区域,粒度更细,rebuild压力也就越小。
也有人说Vnodes负载均衡的情况还可能是让性能好的机器服务更多、更热的片,小机器就混一混。机器规格不一致的时候,确实是个好处。不过我实际在工作中挺难看到不一样的机型在同一个集群。可能现在机器越来越便宜了吧,以前还是很看重成本的,甚至看到机器闲置会进行降级。
整个算法知识都可以看文章 https://interviewnoodle.com/how-to-use-consistent-hashing-in-a-system-design-interview-b738be3a1ae3 ,讲的很细,图都是引用的它的。
现在来讲讲如何代码实现一致性哈希。
简版
简单版本,我们只做哈希环,然后node负责连续分片。
def hash(key):
return hash(key) % 2^32
map<hash_value, node> ring
# map key可以不是范围,而是end分片,这样可以用lower bound来找到第一个大于等于req_key的node
# 但原生Python不支持,得新建class
# Java ceilingEntry和C++ std都可以直接用
def get_node(key):
hash_value = hash(key)
return ring[lower_bound(hash_value)]
# main
req_key = hash(req)
node = get_node(req_key)
node.handle(req)
[!NOTE] 如果存在一群相同元素,那么 lower_bound 和 upper_bound 就可以找到这群元素的上下界限,前者指向下界限,用 lower 表示,后者指向上界限的后一个位置,用 upper 来表示。也就是说,lb是大于等于key的第一个元素,ub是大于key的第一个元素。
开源实现
Guava consistentHash
Guava库中的com.google.common.hash.Hashing.consistentHash就实现一致性哈希算法。一般使用方法是,你有一个key,用Hashing中提供的某种hash算法来hash这个key(比自行提供hashCode会好,提供了murmur之类的算法),得到的HashCode去调用consistentHash方法,再加上一个bucket数据限定,就可以得到一个bucket的index,也就是说,你的key会被分到这个bucket里。
但仔细看它的consistentHash函数,它压根儿没做一致性哈希理论的那些事,完全没有哈希虚拟空间的事儿。
它的理论是源于此文章 https://dl.acm.org/doi/10.1145/258533.258660 ,一致性哈希的根本定义是“对所有的 Buckets 和 Items 应用相同的哈希函数 H,按照哈希值的顺序把它们排列到一条线上,然后将距离 Bucket 最近的 Items 都放入该 Bucket 中”,哈希环是一种实现方式,但不是唯一的实现方式。
Guava一致性哈希算法实现者的文章,https://arxiv.org/ftp/arxiv/papers/1406/1406.2294.pdf ,批斗了一波原版,提出了新的“jump consistent hash”,不用存server/bucket服务哪些哈希片,速度还快。但它是有条件限制的,buckets必须是连续,否则这个index刚好是下线了的node id,那肯定不行。如果要用这一套,必然是得把bucket抽象化,也就是Vnodes那一套。
先只看JumpConsistentHash。首先,先抛弃一致性哈希的经典哈希空间,抛弃空间与真实bucket的对应关系,我们只去想这个算法要干什么,就是想将input放进bucket里,想均匀地放,当然也不能乱放。不乱放是指,key=k1,那么k1在bucket数目恒定时,就应该永远被放入同一个bucket,不然就是随意乱放了,random放,更甚者循环放就行了。
规律总结就是,记ch(key, bucket_size)为一致性哈希函数,那么得有:
- ch(k, 1)=0,即所有key都放bucket0,毕竟总数只有1个bucket
- In order for the consistent hash function to balanced, ch(k, 2) will have to stay at 0 for half the keys, k, while it will have to jump to 1 for the other half. In general, ch(k, n+1) has to stay the same as ch(k, n) for n/(n+1) of the keys, and jump to n for the other 1/(n+1) of the keys. ch(k,2),就是分一半流量给新增的bucket1。进一步的,ch(k, n+1)对比ch(k, n)则是,n/(n+1)的key完全不变化,1/(n+1)的key,它们的bucket变更成n。(必须n/(n+1)部分是完全不变化,bucket值都不可改变,不然就算不得一致性哈希了,就是随便乱来算法。)而既然是最后还是要key平均进入bucket,当然是得每个bucket里抽出一部分来,放进新bucket。
这样,就可以用ch(k,n)来描述ch(k,n+1)了。也就是说,ch(k,n+1)计算时,都是先用ch(k,n)计算出来,但有一部分key应该考虑分给新bucketn。从一个key的角度来看,它就是在不断jump,它在ch(k,1)时,就是0,然后在ch(k,2)时,就是0或1,满足条件,它就应该到1那儿去,然后在ch(k,3)时,它又该考虑是留在bucket1还是跳到bucket2,以此类推。还真是名副其实的jump。
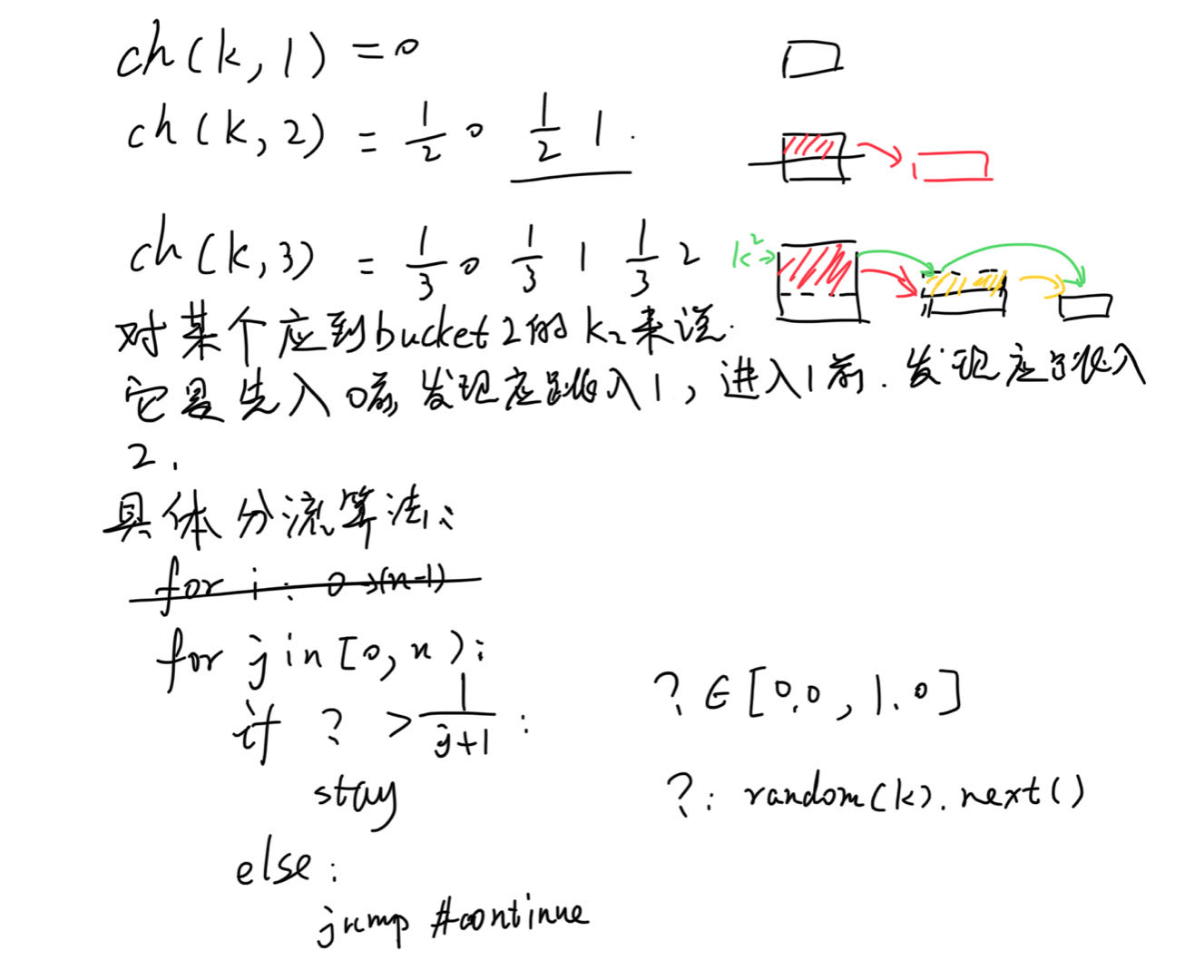
图中,从左下框架上来看,只有?函数安排合理,就能得到一个非常简单的一致性哈希算法实现。那么,关键又变成了什么样的函数才能做到。假设k2是输入key,返回值是恒定的0.1,那么2个桶,它就会被判定去桶1,3个桶就去桶2。但这么就搞得只有小key才会挪动,不够随机。所以这里的函数一般是随机函数,但由于我们必须保证原则“bucket数量不变时,k应该对应唯一一个bucket index”,所以这个随机不是真的随机。所以实现上,会拿key本身作为seed,它对应不变的一组数字序列,是可预期的。所以对一个key来说,在bucket总数不变时,结果是一样的。
文中还做了进一步优化,大概是能跳过一些没必要的j loop,毕竟j越大,能跳的值就越少了,有些都不太需要处理这一遭。没有仔细看,有空再啃一下原文,可以参考 https://zhuanlan.zhihu.com/p/625123381 看一看。
Ketama
前面那个属于邪教了,课外读物,当然很厉害。真的去实现理论算法的,较为有名的一种实现叫Ketama算法,该算法最初是由Last.fm的程序员实现的并得到了广泛的应用
标准ketama好像是 https://github.com/RJ/ketama ,只有c实现,其他语言都是调用c库。本质没什么特别的好像,可能就是较早的广泛的算法实现。
https://github.com/ultrabug/uhashring 是纯Python实现,其中也包含ketama。特点是,中途可以加减node,还有weight,weight就是大的vnode多一点,这样key会较多的到weight高的node上。这一版实现值得多看看。
redis(其实并没有)
redis常有人说用到了一致性哈希,具体是说redis cluster的data sharding。但作者明确指出它的slot sharding不是一致性哈希,https://redis.io/docs/management/scaling/。我们来分析下。
首先redis cluster data sharding的Hash槽就少一点,当然这不是拒绝被称为一致性哈希的理由。再就是一个redis node也是负责一堆slot,也可迁移slot,类似Vnodes,但不是Vnodes就一定是一致性哈希。因为redis cluster是让一个node服务一个slot,并没有当前node下线,就可以自动找下一个node的机制。因为node有存储,不是缓存,不天然满足一致性哈希的理论要求。但它倒确实是满足了“增删节点只影响一部分数据”这一条准则,让人觉得这就是一致性哈希才能做的事情。但还是要抓重点,redis cluster并没有为了做到能让下一个node服务,让nodeB多hold一份nodeA的存储数据。从这个角度看,它只是hash,很多分布式存储都哈希分数据,但它们也没谁说是用了一致性哈希。
HASH_SLOT = CRC16(key) mod 16384
redis的client jedis倒是用了一致性哈希,client/proxy端做请求分流,还是很简单的。
Dynamo
更标准的在存储端使用一致性哈希的例子,应该是Dynamo, 原文是《Dynamo: Amazon’s Highly Available Key-value Store》。再对比下Redis cluster和Dynamo,它们在哈希存储时,都面临存储node下线后就无法服务的问题,必然得想解决方案。最常规的办法是,为每个slot做一个多副本备份,slot副本之间用某种一致性协议保证数据同步。redis cluster也是如此,所以是master/slave机制,选主由外部服务sentinel负责。所以redis cluster架构其实就是普通分布式,当然它还有个特点是,用gossip协议组成集群,而不是中心化管理集群,实际工程上用起来贼难用。不管怎样,redis cluster是非常常见的hash shard+replica的分布式存储架构,只是具体选型有序别而已。
而Dynamo不一样,它硬是一条路走到底了。原文 https://www.allthingsdistributed.com/files/amazon-dynamo-sosp2007.pdf 。解读可以看 https://medium.com/@adityashete009/consistent-hashing-amazon-dynamodb-part-1-f5719aff7681 的系列文章,Vector Clocks,Sloppy Quorum等很多细节还没看。
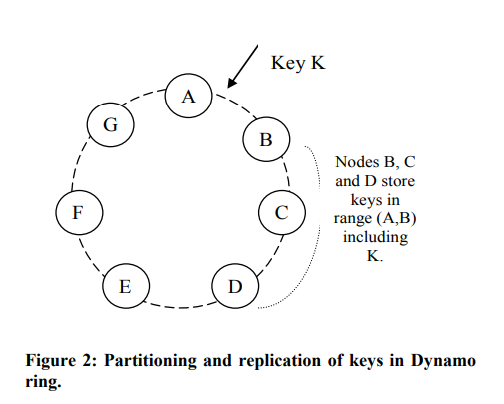
可以看到,它真的贯彻了一致性哈希的思想,为了能在B节点挂了的时候,能继续服务,让B之后的数个节点都放数据备份。或者看下面这张更细致的图:
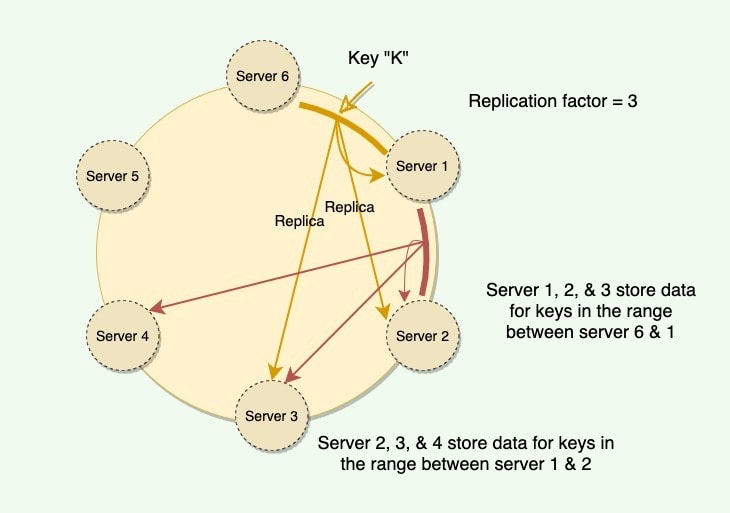
Dynamo也用到了Vnodes,但还是那句话,Vnodes是一个单独的机制,不是一致性哈希的核心,不影响上图的核心思想,所以Dynamo可以说是使用了一致性哈希的。
> when a node is removed, the next node (moving clockwise on the ring) becomes responsible for all of the keys stored on the outgoing node.
ref https://www.educative.io/answers/how-data-is-partitioned-in-dynamo
是一致性哈希的最核心思想,也是最重要的特点。
消息队列
消息队列的逻辑,就是做和内存队列一样的事。但它的使用场景,是分布式的。也不会是单一角色的,都分布式了,所以涉及多角色(或者说多进程)。于是,基本都会抽象为,producer发消息给它,consumer去从它那里获取消息。为了保证可靠和堆积,消息会被MQ持久化。MQ的核心是Queue,也就是FIFO。至于producer有几个,consumer有几个,consumer是pull还是被push,都是具体设计的事情。队列消费,听起来,一个消息按理应该只被一个consumer拿到,消费成功后,就会被删除。但实际也会有变种,有MQ不断发展,加新功能的,不会特别死板。
一个较简单的mq工程可以参考 https://github.com/zeromicro/go-queue 。注意它是封装者,核心不在它这里,比如它底层接Kafka。
实现
RSMQ
真的MQ算法实现,RSMQ是一种经典方案,简单,具体实现有不少项目。可以看看这个 https://github.com/mlasevich/PyRSMQ 。
One simple implementation of a message queue is using Redis. There is a Python implementation of Redis Simple Message Queue (RSMQ) called PyRSMQ . RSMQ emulates Amazon's SQS-like functionality, where there is a named queue that is backed by Redis. Once the queue is created, producers can place messages in the queue and consumers can retrieve them .
Here's an example of how you can use PyRSMQ to implement a simple message queue:
from rsmq import RedisSMQ
# Create a new instance of RedisSMQ
queue = RedisSMQ(host="localhost", port=6379, qname="myqueue")
# Create a new message in the queue
queue.sendMessage().message("Hello World").execute()
# Receive the next message from the queue
msg = queue.receiveMessage().execute()
print(msg['message'])
# Delete the message from the queue
queue.deleteMessage(id=msg['id']).execute()
这个项目是将redis作为远程存储,同时利用redis的一些功能,去实现一个MQ,不是简单的使用者。
Kafka
这是最经典的工程实现了吧,值得多研究研究。
一个队列的基本定义里就应该是有序,不过Kafka并非专注于MQ,它本质是一个分布式事件流平台。这一点要注意,Kafka只是可以用来搭建消息队列,但不是只能做这个。那么事件流和消息队列为什么是两个概念呢?比如,kafka里的一个topic其实也就是一个message queue了,为什么感觉名字差距很远?事件流为何不叫作扩展版的消息队列?
这个问题,我的理解是一个中间件,上下游同样都是生产者和消费者。生产消费者数量可以是多个,这不是什么难点。所以,没必要觉得MQ的consumer只能是一个,概念不至于这么僵硬。但它们对待输入的message的态度是不一样的。
消息队列注重的是传递消息,满足Message Queueing Pattern,通常保证exactly once。它从描述上就更像是P2P的东西,你一份消息传给多个消费者,感觉就像是消息被复制了一样,所以看到很多地方对MQ的定义就是单消费者,我认为单消费者MQ是经典案例,但不是多消费就被逐出MQ了(没有MQ内核,丢失了MQ的精神,joke)。MQ中,消息本身是用完就扔了,即使有一定backup,也不太可能设计为永久存储,存也不是MQ必须去做的事情,不然它叫什么队列呢,叫数据库好了。当然,真有人在MQ里保存永久消息也不是违法的,不必认为MQ就不可以干更多的事。
Message Queueing Pattern更多的是和Pub-Sub Pattern对立,Pub-Sub的不一样就在于,所有订阅者都应该拿到所有消息。它描述的就是MQ所不包含的一种模式。
而流streaming就是满足Pub-Sub Pattern的,这里最好不要把流当成“流水”那个意思,感觉好像也是水流过就走了,没留下什么。streaming是会将消息记录下来的,它像是log,它要记录下所有event。当你在某个时刻才加入一个消费者时,它也可以获得全部的event。我们谈到streaming,它就应该做得到。如果是MQ的设计,要存下所有message,就不是很像queue了,你不能去要求所有MQ系统都给你这样的功能。如果你就想MQ补充这一功能,那也OK。
streaming通常被说带有实时的意思,我感觉并不是,real-time streaming才是。参考 https://sqlstream.com/real-time-vs-streaming-a-short-explanation/,streaming更多是在说它是源源不断的,持续生成,看不到尽头。区别于batch,是一个批次被处理(每条消息都看作一个batch,谁又能说streaming不是batch呢,joke again。这些概念可能没有那么泾渭分明,那也可能是我理解不够深刻)。事件是源源不断地产生,这就叫做event streaming。
所以,这两个概念可以说是没啥关系,不是非要取分出个所以然。听到某个系统是MQ,你就知道它会给你MQ基本的功能,但它可能还有更多的扩展,它可能做到更多的事情,能当流用,也可能因为它的具体设计,它其他啥也做不到了,但它就是很好用、很适合你的MQ。
https://kafka.apache.org/intro 官方文档也介绍了Kafka一般的使用场景,反正满足要求你就可以用。Kafka的topic可以pub/sub,所以,就可以拿Kafka作为MQ的底座。
架构与有序
Kafka架构上就是可以给topic分区,每个partition也可以有多replica,几乎等于分布式db的架构。也正因此,各个partition之间是无法有序的,就像分布式db中按hash分片的table一样,不能天然支持range scan。单partition当然可以做到有序,不过,能放开限制自然是放开更好,能利用上分布式的优势,并发、容灾等。
TODO kafka log设计
Log
万物基于log,log门。
https://engineering.linkedin.com/distributed-systems/log-what-every-software-engineer-should-know-about-real-time-datas-unifying 作者提倡把log作为一种抽象的概念,就像我们谈到hash,不会去具体讨论它是murmur hash还是别的。我们就把log作为一个已知的概念,不去讨论它是什么,而是去讨论它能做什么。
So a log, rather than a simple single-value register, is the more natural abstraction. Log可以表示
a sequence of requests,也可以说是changes,它是一种很符合现实的抽象概念。程序基本都是在跟持续的请求打交道,而不是单一的请求。单一的,比较简单的例子就是数学计算,与别的无关,没有状态,只要给我同样的输入,我就会给同样的输出。还有cache,我就是只get/set,先到先得。但现实中,基本不是这么简单的情况。
拿Table和Log的关系来分析,Table是当前瞬间的状态。而Log是一个序列,包含了所有的变化,也可以说,它保存了所有的历史版本。历史版本,就让人很容易联想到source code version control,每个commit并不是记录当前的所有code,而是记录change。
介绍三个方向,分别如何使用log: Data Integration—Making all of an organization's data easily available in all its storage and processing systems. Real-time data processing—Computing derived data streams. Distributed system design—How practical systems can by simplified with a log-centric design.
-
Data Integration 类比马斯洛的金字塔需求模型,data就是最底层的需求。(开始玄学,但确实也没说错。)许多现实系统中,其实data就没准备好,Data Integration做的差,就在此基础上搭分析、建模等模块,和搭房子一样地基不稳。 Data Integration为什么难,作者认为是两个趋势导致的,一是event data井喷,二是data system变得非常专用。第二个好理解,很多现实场景遇到的挑战,已经不是某个data system可以解决的了,所以出现了很多细分的领域和功能各有优劣的system,例如,olap,oltp,online,batch,streaming,graph等等。第一个event data的话,我理解不深,目前的理解是event data区别于entity data,它描述的是事件、行为,而不是某个东西的最终样子,例如某时刻的点击,某时刻的登录,而entity data例如用户名、id、地区,更静态。如此区分data,主要还是没有万能的银弹,区分后会更适合去处理它们。而单独划出来的event data,传统的DB很难撑住,也就诞生了更多品种。如今的data system确实是相当多,无法将它们视为一个整体,经常要去处理它们谁流到谁那儿去的问题。
而不同data system如何同步数据?都可以抽象为log-structured data flow。Data Source将数据变化写入log,其他data system作为subscriber,读log并自己追上数据变化。无论subscriber是哪种system,这个模型都是行得通的。就算subscriber是个cache,它实际并不存log,但它也可以通过log来同步数据。而且,log自带版本概念,可以很清楚的知道自己从这些subscriber中读取的是不是最新数据。还有一点是,log可以当作是buffer,不同subscriber消化数据的速度是不同的,也可能在某个时刻,subscriber down了,那么log还在,重启后也能追得上。从图上也可以看到,log是一个用来解耦的概念,subscriber只需要懂log,它不需要知道Data Source长什么样,这也是一个优点。

在作者公司linkedin中,实际的场景就是
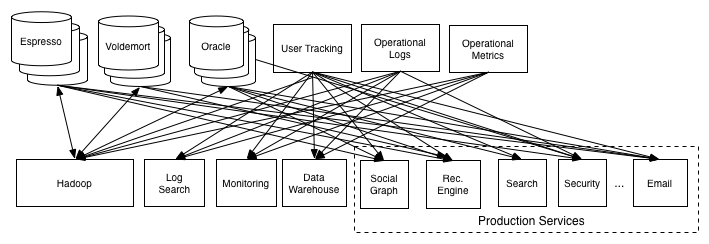 通过Log,架构变为
通过Log,架构变为
 非常简洁的架构,也可以看出Log抽象的价值。(其实这也就是kafka的简要架构图了。)
非常简洁的架构,也可以看出Log抽象的价值。(其实这也就是kafka的简要架构图了。)在这样的架构基础上,实际还有一些点需要考虑,就是ETL,数据并不一定是都有意义的,结构可能不是统一的,很多场景里ETL(cleanup or transformation)后的数据才值得使用或存储(存入数仓)。ETL后的数据还是一样要考虑到subscriber可能是batch的数仓,也可能是实时的什么系统。前面的架构图看不出具体的角色,所以我们应该用下面这样的详细一点的图:

图中有三种角色,publisher,log system,consumer,ETL放在三个角色的哪个中,都是有说法的。具体情况具体选择,比如,数据肯定不需要被consumer收集的,就应该在publisher处直接扔掉,也就是cleanup,没必要走接下来两步。有些数据是否被consumer收集,需要看它的值,那它们肯定存在于log内,只是有些流不会传出它们,相应的consumer也就接收不到。也有些操作可能只能在consumer端做,比如针对consumer背后系统的aggregation,其他系统都不需要这一阶段,那肯定得它独自增加。
Scalable Log,实际为了做到多subscribers,没有那么简单,所以他介绍了kafka log的设计如何满足scalable。暂时不看了,后面读kafka再说。TODO
-
Real-time data processing
Stream processing has nothing to do with SQL. Nor is it limited to real-time processing.
Yes,俺也一样,我也觉得real-time和stream并非绑定关系。
I see stream processing as something much broader: infrastructure for continuous data processing. I think the computational model can be as general as MapReduce or other distributed processing frameworks, but with the ability to produce low-latency results.
batch和stream的概念,他也举了个例子,US人口普查,人口统计是下到挨家挨户统计,记录在纸上,然后this batch of records传到中央,中央把全部加起来。它不是每个地区都有a journal of births and deaths,用它来算当前人口,甚至能算到某一年的人口。这不是说journal形式就很优秀,而是各有各的区别。有些数据就是batch进来的,你就应该batch处理,有些数据就是continuous feeds,那肯定就想要能够能平滑地处理连续数据,而不是转为batch。这是自然的应对方式,当然,如果分析下来,batch没什么不可以,那也可以batch处理。要平滑处理数据,还有就是,不可能数据1s来一条,你stream处理它花5s,来不及消化的数据能堆积到明年,所以stream通常是要求low latency的。
Log在real-time data processing中怎么工作的,进一步可参考https://samza.incubator.apache.org/learn/documentation/latest/core-concepts/core-concepts.html。他聊到了Data flow graphs,Stateful Real-Time Processing,Log Compaction
-
Distributed system design
The final topic I want to discuss is the role of the log in data system design for online data systems.
TODO 为什么分布式一致性协议全都是需要log?它们不考虑整个table原地修改?这个话题还是分布式协议再讲。paxos multi-paxos raft这些。 附加一个paxos参考 https://zhuanlan.zhihu.com/p/341122718
分布式锁
锁的概念不多赘述,分布式锁当然是分布式里用的锁,语义是一样的。举个例子,分布式中同一个角色有多个时,它们很可能需要协调谁可以写,另外的人此时不要动。每个人都觉得自己该写,那当然要一个第三方角色,来觉得谁能谁不能,要达成共识。常见分布式锁的实现是基于数据库,基于Redis,基于zk的。
TODO 为啥有个印象,有消息队列做分布式锁? 估计是经常有人说redis实现这两个 以及消息队列会用到锁
现实考虑,已有消息队列时,利用它可以不用加其他的依赖。
但mq的分布式锁是有限制的?模型如果是msg发送,收到msg的认为自己是主,那么msg定时发送的话,下一次的主就不一定是当前这个。如果是利用sub订阅的排他性?只有一个consumer能连通,其他consumer都在等着,那倒是可以。
这篇文章介绍的redis做分布式锁,也有redlock和zk的一些理解,还提到大佬对redlock的讨论,读一读
MVCC TODO merge draft
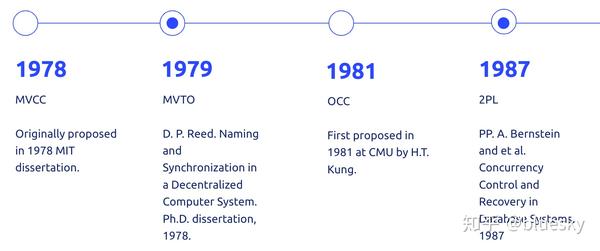
MVCC 是经典题目了,把它当八股文来记,感觉非常悬浮。我曾经说出过,每行多增加两列,但两列怎么运作的,都讲不清楚。原因当然是并未理解,连推演都没有很深刻。但 MVCC 经历了很久,1978年便被提出,现在主流的DB也都有它的实现,还有很多篇论文在创新、总结它。它毫无疑问变得复杂了,区别于基本算法书中的数据。
找不到现成书籍来提供精简的讲解,读论文和源码都很容易陷入细节。所以,我的想法是,从上层逻辑来理解MVCC要做到的事情,其实也就是算法+数据结构的抽象。比如,MVCC是解决并发,那并发读和写两条路,每条路分几步,某一步要做什么。为了这个算法,我们需要什么样的数据结构,可以只当个黑盒。具体到每个步骤的细节,和它们的优化,数据结构落实到代码上、内存上,这些都先不讨论。毕竟,开源DB那么多,需要抠出某个地方的细节,必然要花相当的时间去调研、对比。
最经典的论文是 An Empirical Evaluation of In-Memory Multi-Version Concurrency Control(VLDB17')。如果想快速获得一些关键点,可以看翻译,https://blog.mrcroxx.com/posts/paper-reading/wu-vldb2017/ 。本篇熟悉后再进一步,还是要看论文。
首先,MVCC是Concurreny Control,那肯定有多个角色要同时对一个东西操作。所以,我们在这里确定一下场景,场景就是有一行,有多人对其进行并发读写,那么,最简单的例子就是one row/tuple, readers, writers。先忘掉什么范围读写、跨行读写。
**第一个点,MVCC 写数据怎么写,多版本当然是写的时候出现多版本,读生成多版本也是挺离谱的想法。那么,写会怎么写,分create/insert和update两种情况。
接下来的事情我们默认是commit过了的,而不是txn的中途的一些change。
先看insert新的,insert当然要带上writer自身的txid,才能知道哪些tx早于此tx,不可以看到这一条新insert的数据。可以在postgre里实验,select current txid和新insert行的xmin,current txid为i,xmin就是i+1,意味着比我更大的tx才可以读到这一条数据。我txid i怎么看到这一条数据,不用特别管,无论是缓存或是逻辑上就考虑到xmin-1这个id都可以,不要陷入细节。附带地,我们可以考虑下delete这一条数据,根据逻辑,我txid j去delete它,比我小的tx都应该能读到它,只有>=j的才应该知道它被删除了。所以tmax就会因为delete而改为j。某个id来读数据时要查是否<=xmax。xmax也能在postgres上select出来。**
提到MVCC必然提到具体三种实现,它们实际是随着时间发展出来的。
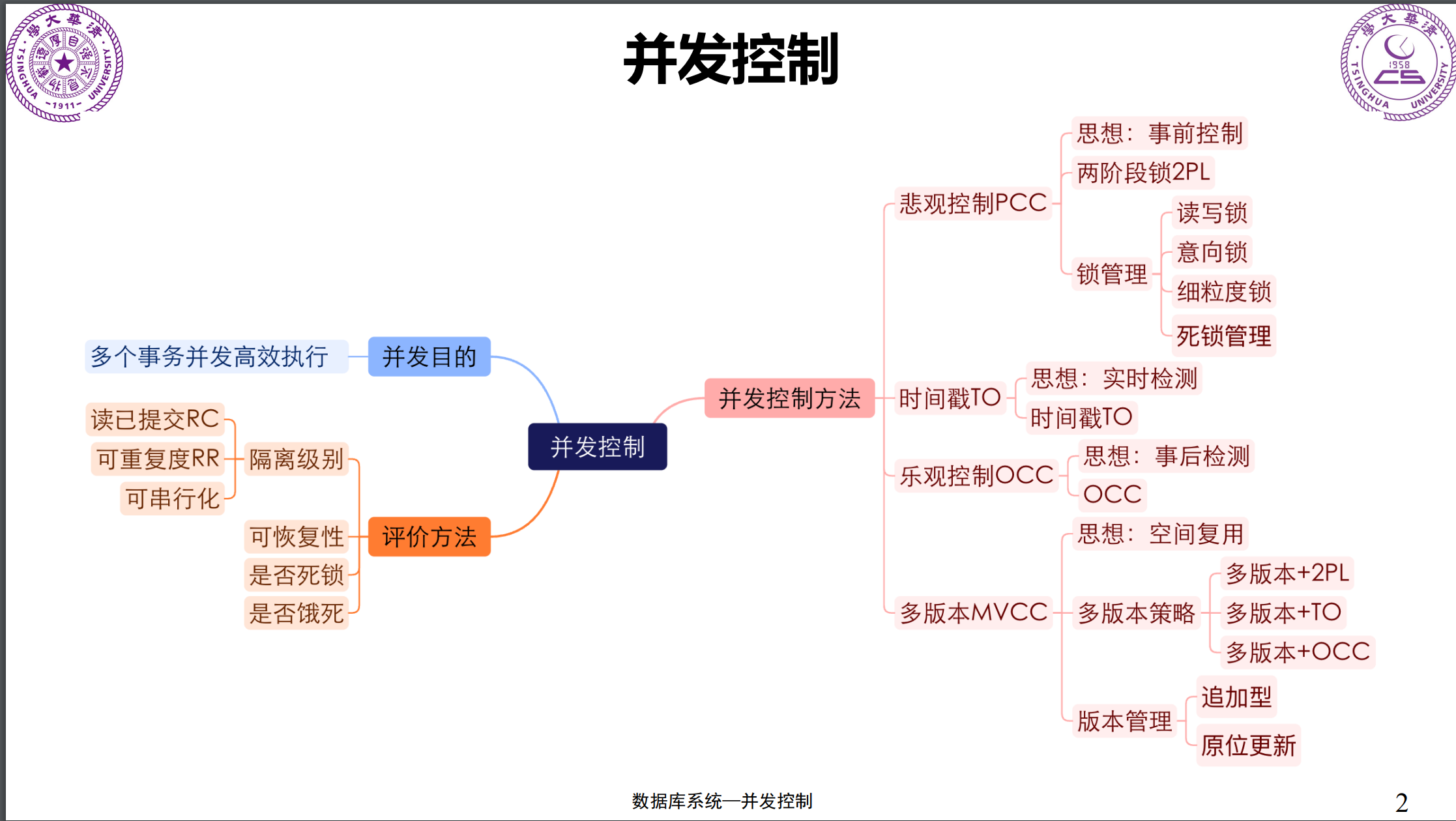
4个隔离等级,3种错误的读(脏读、不可重复读、幻读),MVCC等各种各样的并发控制算法就是来避免错误读,所以各个算法也应该用它们来评价。
并发的错乱都是写在影响读,读会出各种离谱错误,双写导致更新丢失,三种错误读。
错乱需要被治理,但是错乱可能是摆不平的。所以,就有了两种态度:
- 悲观,事前控制,直接不让冲突发生(自然的,正在运行的事务会加各种保护数据,避免别人干扰自己)
- 2PL
- 图
- 乐观,事后控制,冲突发生了再说,基本是abort掉(只在最后检查冲突,那途中就应该会很少保护数据)
- TO
- OCC
然后,这几种基础算法都可以配置多版本,多版本给它们带来了更多的空间,给读更多的路线,提高读并发。
教材
https://youtu.be/1Od_SuOQshM?si=hQpSPPLj3bdgMn_i
我以CMU的这个视频为教材,它额外定义了不止两列。其实postgres里除了xmin和xmax,也还有其他列,但综述性文章基本都只讲这两列。为了更简化,我也不做额外说明,不要把下面讲到的东西当作工程化实现来看,它们都只是理论上说得通的程度。另外,不要关注于ts这个说法,全文都可以把ts看作txn id。
简单来讲,可以理解为:仅仅只有xmin和xmax(或记为begin-ts和end-ts)是不足够的。还需要考虑更多的事情,不仅仅是一个version的生命周期。因此,发展出三种主流方法。
每个MVxx算法,其实都是有一个基础算法,然后扩展到多版本。
MVTO
考虑这样一种情况:如果Ti读过了Object,假设读了version j,此时有个早于Ti的txn Tk来update Object,它就不应该成功。如果它成功了,新建一个version h,Ti的读就会像幻读一样,大于Tk的txn除了Ti都不会读到version j,而是读version h。
这也引出了第一种算法,MVTO,timestamp ordering。PPT上的例子,你需要提前知道:
read-ts是拿来看last read txn此列的ts,新txn读过此数据的话也会更新它。begin-ts和end-ts也就是xmin和xmax的意义。txn-id是一个标记,表示是否有txn正在修改这个数据,0表示无任何txn在修改。(只是需要一个类锁的机制,不是必须要这样,其他实现方式也可以。)
全流程为:
Tid=10的read A(A目前就一个版本),它看txn-id=0,发现没有任何writer在写它,就可以认为它能读到正确的数据,再看当前Tid是否在begin-ts和end-ts之间,begin-ts是1,end-ts是无穷,自然可以读,并且将read-ts更新为10。
接着Tid=10去write B,它发现txn-id是0,没有人锁住B,而Tid也大于read-ts,所以Tid=10可以修改B。先“锁”,然后将txn-id改为10(注意是B1的值,还未新建version),create a new version,记为B2,复制B1,这样txn id是10,begin-ts是1,当然不应该,所以begin-ts要是10,而B1的生命周期也就到此为止了,所以修改B1的end-ts为10。成功后就把txn-id改为0,释放“锁”了。
注意以下几点:
- 能不能改B要看read-ts,如果有Tid=50的txn在10之前读了B,那Tid=10就不能改B了。不然就导致Tid=50读到的B反而是早的,B更新完成,假设又来一个Tid=30来读,30会读到新B,反观50读到旧B,这就不对了。这也正是保证了ordering,也就是MVTO的名字意义。
- 这里B1和B2都加“锁”了,因为你create a new version,其实也要改变B1的已存在的version的内容,end-ts会因为create new version而被改。
- 我将txn-id称为“锁”,CMU PPT中也说的是用lock。但大部份资料都是说它完全不用锁。可能是在说txn-id这个值可以通过cas(lock free)保证并发安全,所以说“无锁”?可能是在说read时不用加锁?可能是说事务级别的加锁(区别于2PL之类,事务访问前要互斥锁、共享锁)?http://nitttrc.edu.in/nptel/courses/video/106104135/lec40.pdf 估计是区别于2PL。
MVTO这个算法,可以看到它比较简单,其实没多优秀。它虽然保证了ordering,但为了这个ordering,感觉很多情况都得abort掉(txn中称为rollback)。那也就是说,这个算法建立在觉得冲突不会太多的情况。它是“乐观的”,因为它不保护不阻止,出现冲突就abort。
缺点可以再搜搜,我目前只同意以下几个:
Thomas write rule
https://dbgroup.cs.tsinghua.edu.cn/ligl/courses/slides08.pdf
MV2PL
第二个例子是MV2PL,它不使用read-ts,而是使用read-cnt,read-cnt可以拿来做成shared lock,txn-id和read-cnt一起可以组成exclusive lock。ppt举例说明,txn-id=0,read-cnt + 1就代表我这个txn share了这一行,我正在读。而当我想写,我得看txn-id要为0,read-cnt也要为0,证明无人读写此行,我才可以操作。写步骤类似,先B1上txn-id和read-cnt改为10和1,再复制出B2,B2 begin-ts应为10,read-cnt为0,注意这里B2可以不上锁,它可以被别人读。但B1得上,它还没改end-ts等flag,B1改完解锁。
B2被人读也不对吧,B2没commit的话,不就是脏数据?必须当前版本B1无人读写才能写B2,也不对,这不就是读阻止了写? B1加上锁,只允许单个事务占有它是合理的,毕竟“增加版本只能允许一个事务操作”是合理的。但要等到读都为0才锁住B1是奇怪的。
回想2PL,MV2PL增加了多版本,但2PL这个基础流程是没变的。所以,是当我想写时,我应该lock住,不准别人修改,直到commit前或者当时才会unlock。而我想读,就会给读的版本加上read-cnt,也就是共享锁,阻止别人来修改它。那么,当我正在读B1,此时别的事务想要加一个B2,它应该怎么做? 假设条件很放松,它可以不管B1是否被读,就可以加B2并修改B1的end-ts,那么B1的end-ts就不知何时被加上,这个时候正在读的事务就很可能读到变化,多个事务看到的可能不一样,正在读B1的事务的多次读都是有危险的,可能第一次读ok,第二次读的时候end-ts已经变了,如果end-ts小于当前事务版本,实际已经不应该读它了。
总之,读锁本身也是在限制他人修改,只是允许其他人也来读,所以,这个tuple上有读锁,就不该被改。多版本不是让“写过程”期间可以读写同时进行,而是让可以去读版本的事务去读版本,不可以读老版本的,该abort就abort,单版本是做不到分流的。
一般,需要获得写锁时有别人read这个当前最近版本,会abort掉,同样,当我可读的版本是别人正在write的,也是abort。
MVOCC它没例子,只在提到前面列举TO,OCC,2PL三协议时提到。也对应论文An Empirical Evaluation of In-Memory Multi-Version Concurrency Control。MVOCC好像是HEKATON MVCC提到的,翻一下PPT。
先把锁讲清楚,再说2PL,最后聊清MV2PL。
首先,读写对一Object上锁,就可以直接跳过纯用互斥锁了,肯定是读写锁效率更高。注意,简单的读写锁是指在需要操作Object时加锁,完了立即释放。这样的读写锁简单,但缺点茫茫多。用前面说到的指标来评价它,它是既会丢失更新,也会出现脏读、不可重复读、幻读。所以,它不是一个好的并发控制算法。
一般相关文章都是讲X和S,互斥锁和共享锁,不是R和W读写锁,注意名词。
四指标:
T1先更,T2又更,T1再读就会发现T1自己的更新没了。脏读,则是T1更,T2读,T1回滚,T2就是读到脏数据了。不可重复读,T1读,T2更,T1再读,T1读到了T2的更新,它只是重复读,就崩了。幻读,T1 count(),T2插入,T1再count(),T1在范围级别读到了变动。
那就更别提可串行化调度了,并发事务的最后结果全凭缘分。
于是提出了2PL,2PL就可以做到serializable,能做到serializable的隔离等级?应该是conflict serializability吧。
因为它是拿锁从而阻止冲突,所以2PL是悲观的。
稍后再说,它可串行化,但能不能可恢复。
2P是指growing phase和shrinking phase。前面简单的锁之所以不好使,就是因为拿到锁改完就释放了,别的事务就可以改动它,我们就被别的事务干扰了。那么我们就阻止别的来干扰我们,方法就是先不放锁。所以growing phase只加锁,不放锁。到了shrinking phase再全部放了。
https://en.wikipedia.org/wiki/Two-phase_locking#
照wiki的意思,2PL基础版是非常松的,不只是shrinking phase在commit之前,shrinking phase也是事务中途逐步获得锁。那么,这种程度只能保证解决了冲突,把可能出现的冲突通过锁来编排出顺序,conflict-serializability。但其他的啥也没解决,甚至可以死锁,毕竟拿锁是逐步的,经典死锁例子就是T1拿A,T2拿B,T1想拿B,T2想拿A。
进阶的C2PL,保守在于先全部获得锁,再进行事务,不会死锁,但shrinking phase没做优化,还是在commit之前。 相比于前面的2PL,就解决了死锁问题。
再看释放锁阶段,释放锁不是一瞬间的事情,是逐步地,而且是提交前,各个事务之间的时间差可能导致很多问题。(为什么要“释放早于commit”的版本?我很费解,可能觉得速度快吧。)这里又需要一个概念,可恢复调度recoverable schedule。
目前的2PL和C2PL因为释放早于commit,导致这样的现象:T1还没提交但已经改了A并释放A锁,T2可以拿到A锁并读A。这是在读未提交的A了,脏读。(这里是单纯说2PL,是在原地改A,没说到MV或是Txn自己写自己的local等情况)
比如,T1拿了两个锁,它先释放了A,此时T2就可以拿到A了,T2就可以改动A了,而如果此时T1却做了abort,我不玩了。那么,理论上T2接下里对A的读写都是不可以的,因为此时A已经是脏数据了。T1 abort要rollback,T2理论上也得跟着abort并rollback。T2有可能带着别的事务也得abort加rollback,产生级联回滚cascading aborts。abort和rollback似乎总是混起来。
所以,进一步优化释放阶段,就得让事务不要提前释放X锁。但可以提前释放S锁,毕竟你不修改它,可以先放。这个程度的就是S2PL(strict 2PL)。区别于前面的神奇版本,它做的就是调整了时间,事务要commit后再释放锁,别的事务就无法钻空子了。要是没有级联问题,S2PL还能恢复(recoverable)。
更进一步,还可以SS2PL(strong strict 2PL),所有锁都在commit后提交。对比S2PL,S锁也要先占着,其实基本等于没有第二阶段,只是通常会让SS2PL作为2PL的一个派生类,所以总是说它仍然有2个阶段。
https://15445.courses.cs.cmu.edu/fall2020/notes/17-twophaselocking.pdf 并不纠结2PL和C2PL,直接就是混在一起,反正都挺基础的。重点强调不strict的2PL,是susceptible to cascading aborts。这里是说必须做到级联回滚,但级联回滚是很浪费的,所以应该是避免,而不是去做更好的回滚。
规避了级联是好事,但其实是一刀切的,同时也拒绝了一些没有问题的的并发。(如果想尽量并发起来,肯定是不容易的。锁就是简单但效率低。)
cmu pdf只额外介绍了SS2PL,定义和前面的理解一样,就是commit时才放所有的锁。它跳过了S2PL。无所谓,反正大致是这么几种就行。注意是SS别名Rigorous,不是S2PL。
对比SS2PL和S2PL,S2PL要更早释放共享锁,那么可能出现“我还没commit,我读过的数据就被别人改了”。但这个好像并不影响什么,这种情况并不属于幻读,更不可能算脏读了。wiki的列表也可以看出SS2PL的各项指标跟S2PL没啥区别。那为啥要有SS2PL? 可能是因为SS2PL其实更简单,因为既然我不用更早释放共享锁,我就不用去判断何时释放某个共享锁,代码上会轻很多。SS还有一个额外属性,CO(commitment ordering)。因为SS在释放锁前不允许别的事务读写,所以它的commit顺序就是事务的顺序。这个属性在某些场景下是很有用的,分布式里要全局串行化,就可能需要这样的顺序。这个其实就是我前面提到的“我还没commit,我读过的数据就被别人改了”,T1先执行,读了A然后在第二阶段释放了,由于此时没有别的机制阻碍了,T2可以立马改了A,然后比T2还先commit(这个你也无法阻止,它是可能的),那么T1就没有读到先于它提交的T2的数据。T2先提交,但T1没反应,就是一种错乱,SS2PL就能保证有序。具体可以看下http://heavensheep.xyz/?p=174。

虽然SS2PL更简单,但工程还是S2PL多,主要是为了效率。
2PL聊完了,就要介绍MV2PL了。(内容在前面,有空整理下)
MySQL使用MV2PL保证并发操作,PGSQL使用MVTO保证并发操作?

MVOCC
如果事务冲突较少、执行时间较短,可采用乐观并发控制(OCC)。

OCC是三阶段,和2PL比,场景不同,各有优点,也就是乐观和悲观的区别。
读取阶段:所有读取的数据会拷贝到本地空间,所有写也只记录到本地空间 验证阶段:事务执行commit的时候,DBMS会先检查该事务是否和其他事务有冲突,验证阶段需要对事务修改的数据进行加锁 写阶段:把本地空间的修改apply到DBMS,让其他事务可见,最后释放验证阶段加的锁
可以看到,OCC会先做着自己的事,做完了,等到要交稿了(commit),再去看看有没有冲突。
MVOCC应该也就是在OCC的基础上加了多版本,这样就可以在读取阶段时,不用拷贝数据,而是直接读取版本,写阶段也就是apply阶段,是新增副本,而不是原地替换。
https://marsishandsome.github.io/2019/06/Multi_Version_Concurrency_Control 推荐这篇文章
实现
理论一大堆了,实际还是需要看至少一种实现。
MVCC具体实现,基本都是看mysql的,版本链那一套?https://oceanbase.github.io/miniob/design/miniob-transaction.html 这个文章提到了很多参考资料,值得学习。
无论哪种方案,只要带MV,就是指在修改数据时(insert/update/delete)都是增加记录,新旧记录当然逻辑上得在一块地方,方便找版本。通常来讲,新旧记录是用链表串起来的,也就是所谓的“版本链”。但用脚想也知道,链表做想要的版本搜索是低效率的,估计也是用别的数据结构来加速。但本质还是版本链,主要是强调一种递增,版本是一个一个追加到尾部的。
按照miniob文档,https://oceanbase.github.io/miniob/dev-env/how_to_dev_miniob_by_vscode.html,看源码。
bash build.sh init # if no libevent and others, notice that all 3rd libs will be installed in /usr/local
bash build.sh -DCONCURRENCY=ON
./build/bin/observer -f etc/observer.ini -s miniob.sock -t mvcc &
./build/bin/obclient -s miniob.sock # client connect to observer
obclient可以跑begin/commit/rollback,miniob没有db,直接建表使用。操作在observer的日志中都会有记录,可以靠日志分析代码。
不过,应该先扫描一下代码,有个整体概念。对于细节的理解,再结合日志分析。
重点关注Trx,管理它的类就是TrxKit,用于创建/删除事务,管理事务状态。TrxKit的实现在src/observer/storage里。VacuousTrxKit就是啥都没有,空架子,代码实现就是全部返回空或正确。但再怎么说也是Trx,create_trx也是要返回一个可以用的Trx的,所以还是要实现VacuousTrx。但它确实是什么也不用管,那就不用存Trx,去管理状态了。
Trx类则是包装了整个事务的操作,自然包括begin/commit/rollback,读写也是要被Trx管理的,所以要通过Trx来读写,一般是insert/delete/visit。
VacuousTrx有了,自然也有MvccTrx,也得有MvccTrxKit,能不能commit等事情还要看别的事务的脸色,所以MvccTrxKit也要管理MvccTrx的状态,比如commit时要检查是否有冲突。
MvccTrxKit大致要做几件事?create trx自然得管理生产trx id,所以它得有,这里只考虑并发,原子变量足够。然后要把所有进行时的MvccTrx存起来,这里简单处理就没有做太多效率优化,直接用vector存。
MvccTrx,当然要来管trx和record的begin-end之间的事情,但存record的不是这里,我们抽象为Table。MvccTrx为了能rollback,所有insert/delete的记录都要存起来,所以它还要有个容器来存这些记录。这个部分就是operations,而operations会宕机丢失,所以还配了clog来记录这些操作。做的事情先记log,再记operations。recover自然有相应的 redo操作。visit是没有必要记的。log用log manager管理,也是用trx id来区分。
先忘记redo,只看MvccTrx正常运行时该做什么。最顶层来看,Trx start、commit和rollback,三个事务本身的操作,https://oceanbase.github.io/miniob/design/miniob-transaction.html#%E4%BA%8B%E5%8A%A1%E6%8E%A5%E5%8F%A3。 中途进行的任意insert/delete/visit,都是行数据操作。
先看事务的生命周期,start好说,commit何时成功何时失败?根据之前的学习,它主要看选择什么策略,是乐观还是悲观,有多乐观,有多悲观。看MvccTrx::commit_with_trx_id实现,它是在commit时把insert和delete operation都落实到相应table中,失败了就commit失败。也就是说它是乐观策略,是OCC。operation如果失败了,接下来的op还会执行,ops遍历完才结束,return值还有点离谱,一个op报了错误,还可能被下一个op重置为success?这个地方很诡异。
还有一个特点是,一个写事务,通常会有两个版本号,在启动时,会生成一个版本号,用来在运行时做数据的可见性判断。在提交时,会再生成一个版本号,这个版本号是最终设置在记录上的。分成两个号,这个我在别的系统上也见过,倒没有思考过为什么。commit时使用最新的id,也就是落到表里的修改用的是new id,也就是insert时new version是从new id begin的。那么,commit时刻之前的trx因其id小于new id,所以它们的读写都是合理的。如果用的是start id,它可能很小,那么commit又可能遇到冲突,就算你commit成功了,中途一些id都读过数据,你commit了一个新版本却小于它们。
有一点需要确认下,是id1 commit前后,别的事务重复读它写的行,会不会有问题(不可重复读)? 无论可不可重复读吧,用new id会极大概率降低commit时的写冲突,也让其他事务读上一个版本显得很合理,反正你commit与否,其他事务都应该读上一个版本,而不是你new commit的版本。比较符合时间顺序。
源码 https://github.com/erikgrinaker/toydb/blob/master/docs/architecture.md#mvcc-transactions 也可看看是否容易阅读。